연결이 완료된 상태에서 진행하는 글입니다.
네트워크 설정은 이전글을 참고하셔야합니다.
단순하게 로봇을 작동시키는 일을 적고자합니다.
혹시 패드로 진행할 예정이라면 다음을 참고하시면 약간의 도움은 됩니다만..
일단 ssh로 접속한 상태에서 다음을 입력합시다.
sudo bluetoothctl --agent=NoInputNoOutput그리고 다음처럼 버튼을 누릅니다.

근데 혹시 wating bluetooth가 나온다면 다음을 입력하고
비밀번호를 입력합니다.
systemctl start bluetooth 

이상태에서 scan on 을 입력한다.
systemctl start hciuart일단 이것도 넣어보자

오 뜬다 뜬다..
여기서 MAC를 스캔하고
다음을 입력한다.
trust E4:5F:01:78:18:77
trust E4:5F:01:78:18:77pair E4:5F:01:78:18:77connect E4:5F:01:78:18:77
아까까지 잘작동하던 컨트롤러가 맛이 가버렸다..
일단 내일 충전기를 들고오도록
pc에서
sudo apt update
sudo apt install ros-galactic-teleop-twist-keyboard설치를 진행한 후에
ros2 run teleop_twist_keyboard teleop_twist_keyboard이제 발행을 하면
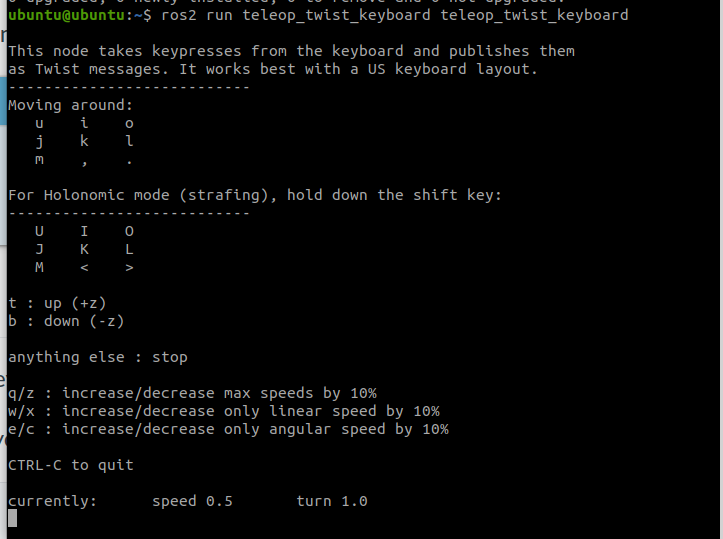

로봇이 정상적으로 움직인다.
라이다 컨트롤 하기
터블봇에는 RPLidar가 달려있다고 합니다. 그렇게 전송하는 데이터가 많지 않아서 USB2.0포트로 충분하다고 합니다. 조사해본바로는 2D Lidar라고 합니다.
일단 rplidar를 사용해봅시다.
우선 터틀봇과 접속을 시도합시다.
sudo apt install ros-galactic-rplidar-rosros2 launch turtlebot4_bringup rplidar.launch.py다음을 통해 라이다를 실행시킬 수 있다. 근데 모터도 다 돌아간다.

추가로
ros2 service call /stop_motor std_srvs/srv/Empty {}디음 명령어를 실행하면 라이다 모터가 꺼진다.
ros2 service call /start_motor std_srvs/srv/Empty {}다음을 실행하면 라이다 모터가 켜진다.

꽤 걸리는데.. 라이다 모터가 꺼진 상태에서 끄라하면 오류가 나는듯으로 보인다.
카메라
https://github.com/luxonis/depthai-ros/tree/galactic
GitHub - luxonis/depthai-ros
Contribute to luxonis/depthai-ros development by creating an account on GitHub.
github.com
해당에 적힌 내용대로 설치를 해주어야 하는 것으로 보인다.
'취업전 프로젝트 > TEAM_실내외배송로봇' 카테고리의 다른 글
| 7. 비상회의를 소집하다. (0) | 2023.03.06 |
|---|---|
| 6. 터틀봇 4도 포기하게 되었다. / 핑크봇을 위한 맵을 만들었다. (0) | 2023.03.06 |
| 4. 터틀봇 4 초기 구동하기 (2) | 2023.02.23 |
| 3. 프로젝트 진행 1일차 진행상황 정리 (0) | 2023.02.15 |
| 2. 프로젝트 요구사항 설계 및 소프트웨어적 해석 (0) | 2023.02.07 |