이 글은 별도의 참고자료가 존재하지 않으며, 정보가 있다면 ChatGPT를 참고하거나, 블로그를 참고하였을 경우 참고한 블로그의 링크를 달아놓았습니다.
이 글은 자동차라고 한정하지만, 배송로봇에서도 같은 통신방법이 사용되고는 합니다. 이 글은 전문적인 내용을 다루는 것이 아니라.
누군가와 대화가 통할 수준을 다룹니다.
이미지는 저작권을 생각하고 가져오지 않았으며, 이 글은 포토폴리오 목적이며, 별도의 수익을 창출하지 않습니다.
(이해를 위해 어쩔 수 없이 이미지가 필요했음을 알립니다.) (문제가 된다면 삭제합니다.)
자동차의 통신은 무엇인가?

차량내에는 수십 개의 제어기들이 서로 안정적으로 정보를 공유해야합니다.
제어기들은 서로 유선으로 통신을 하며, 일반적으로 Bus 토폴로지 형식을 가집니다.
다음과 같은 형식을 bus 토폴로지라고 합니다. 보시면 아시겠지만 하나의 신호선에 많은 제어장치들이 연결되어 있습니다.
원래의 자동차는 bus 토폴로지 방식을 사용하지 않고 각각의 신호선을 사용해서 통신을 했었을 겁니다. 하지만 bus 토폴로지 방식을 통해 통신선을 사용하면서 제어기간 연결 배선이 축소되면서 원가나 중량이 절감되면서 효율성이 증대하게되었습니다.
자동차의 통신 아키텍처 (전기전자 아키텍처링 기술)
위에서 설명한 것처럼 통신선을 사용하여 제어기간 연결 배선 축소를 하였으나, 어떤 제어기들을 같은 네트워크상으로 묶을 것인가?
다음처럼 서로 비슷한 동작을 하는 제어기들끼리 모이게 하면 통신선의 길이를 줄이자, 즉 차량 안의 제어기들을 구조화 및 최적화하는 전략으로 차량 내 배선, 제어기, 통신, 네트워크를 적절하게 설계하여 비용을 줄이면서도 공용화를 증가시키고 차량의 내부에서 문제가 발생하지 않도록 하는 아키텍처링 기술입니다.
자동차용 통신의 종류와 특징
자동차용 통신 프로토콜은 각각의 네트워크를 연결하는 GateWay에 CAN, LIN, Ethernet, FlexRay 같은 방법이 사용됩니다.
CAN 통신
자동차에서 주로 사용되는 내부 통신으로 FlexRay와 함께 제어 명령이나 진단 통신에 사용됩니다. CAN통신에는 다양한 버전이 있습니다. 그에 대해서는 나중에 다시 다루도록 하겠습니다.
CAN 통신을 깊게 들어가보면 데이터통신에 대한 지식이 조금 필요하게 됩니다. 이에 대해서도 나중에 다시 다루도록 하겠습니다.
LIN 통신
주로 LIN 통신 같은 경우에는 Master와 Slave 관계로 정보를 주고 받습니다.
간단하게 이야기하면 굳이 여기다가 CAN통신을 써야해? 하는 느낌이 드는 통신의 경우에 사용합니다.
예를 들어 창문을 올리고 내리거나 에어컨을 끄고 켜는 등에서 말이죠..
Ethernet
우리가 생각하는 인터넷과 같은 의믜입니다. 그러나 자동차에서 사용하는 Ethernet은 차량용 Ethernet으로 따로 분리합니다.
Ethernet이 등장한 배경을 생각해보면, CAN이나 LIN 같은 경우에는 Ethernet과 비교하면 속도가 느리니 처리할 수 있는 데이터가 적습니다.
자율주행의 시대가 오면서 카메라에서 들어오는 영상정보를 주고받거나 핸드폰과의 연결로 차안에서 동영상을 시청하거나
대용량의 정보를 주고받아야하는 경우가 생깁니다. 그 때 사용하는 통신이 Ethernet입니다.
전기차의 차량용 외부 통신의 경우
전기차의 차량용 외부 통신의 경우 주로 충전기와 전기차에서 이뤄집니다.
한국과 미국, 유럽은 PLC (Power Line Communication)을
중국과 일본은 CAN 통신 방식을 사용합니다.
이에 대한 이야기는 다음 글에서 다루게 됩니다.
CAN 통신
CAN통신을 조금 깊숙하게 살펴봅시다.
CAN은 Bus 토폴로지 방식을 사용해서 다음과 같은 특징을 가집니다.
1. 네트워크로 구성된 제어기는 언제든지 정보 송 수신 가능
2. 두 개의 통신선으로 네트워크가 구성되어, 단순함
3. 제어기의 추가 제거가 용이
CAN통신의 주요 표준은 ISO11898 (아이소 라고 읽습니다.) 이에 대한 표준은 넘어가도록 합시다.
(정보를 어떤식으로 주고 받는지 데이터의 영역까지 들어갑니다.)
CAN통신의 물리계층은 500kbps로 최대 거리 130m 까지 가능합니다. 그리고 반사파 현상으로 인해 신호선 양끝단에 종단저항이 설치되어 있습니다. (종단저항으로 반사파 현상을 제거할 수 있습니다. 이를 임피던스 정합(매칭)이라고 합니다.)
(특성임피던스(종단저항) 값은 통상적으로 50옴으로 두나 CAN통신에서는 50옴이 아니라 130옴을 사용합니다.)
위의 그림을 살펴보면 CAN_H와 CAN_L의 두 신호선으로 구성된 것을 확인할 수 있습니다. CAN통신에서 데이터를 판정하는 방법은 두 신호선의 전압차를 통해서 확인합니다.
CAN통신의 통신방법은 Arbitraion 이라는 데이터 필드에서 진행하며, 여기에 달린 메시지 ID가 낮을 수록 우선순위가 높습니다. 이정도만 알고 있어도 충분합니다.
CAN-FD 통신
기존의 CAN 통신의 통신이 느린 것을 조금 빠르게 바꿔보자는 취지에서 만들어졌으며, 데이터를 보내는 순간 많은 데이터가 신호선에 실리게 되면서 속도가 빨라진다. (속도가 변한다) 라는 의미로 CAN-FD (flexible) 라고 합니다.
CAN보다 8배의 데이터를 전송할 수 있으면서 4배 빠릅니다. 그래서 기존의 CAN통신과는 다르게 암호화가 가능합니다.
이거보다 더 빠른 CAN-XL이라는 놈도 있는데, 아직 개발중에 있는 단계라고 합니다.
LIN 통신
서브네트워크 방식으로 간단한 기능을 제어합니다. single wire 방식으로 최대 속도 20kbps이며, 간단한 ECU제어용 로컬 네트워크입니다.
앞서 말한 것처럼 single master와 multi slave 구조를 가집니다. CAN보다는 느리고, 기능이 적지만 저렴하기 때문에 주로 사용됩니다.
DC-LIN 이라고 하는 전원선으로 LIN 통신을 하는 방식도 있으며 표준은 ISO 17898이라고 합니다.
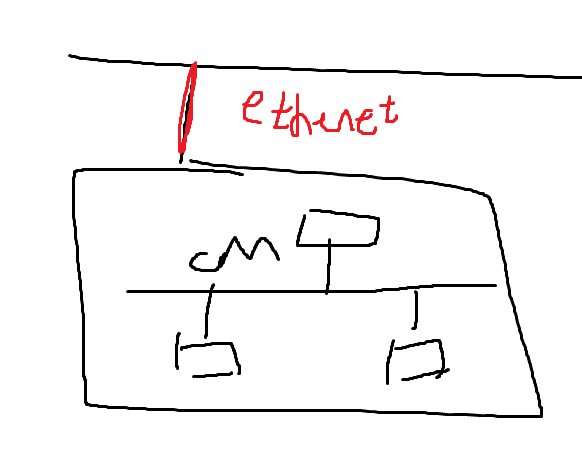
Ethernet 통신
앞서 언급한 것 처럼 센서의 데이터 증가와 멀티미디어에 대한 요구로 대용량의 데이터를 처리할 수 있는 통신 방식이 필요합니다. 그러나 기존의 Ethernet과는 다르게 차량용 Ethernet 기술이 필요합니다. (진단통신도 등장 배경이 될 수 있습니다.)
그래서 차량용 Ethernet의 특징은 다음과 같습니다.
1. 2개의 제어기가 동시에 송수신 가능
2. 스위치를 통해 각 제어기에 Packet 을 전달하며 메인 네트워크의 계층적 구성으로 제어기 추가 제거시 유연한 네트워크 재구성이 가능합니다.
3. 메시지의 송 수신이 유연하게 이뤄집니다.
Ethernet은 802.1 표준에 맞춰 있습니다.
현재는 메인 제어기들을 Ethernet으로 연결하고 CAN과 LIN으로 서브 네트워크를 구성하는 방식을 사용합니다.
TCP/IP
네트워크를 통해 정보를 전달하는 표준 프로토콜의 집합으로 TCP는 메시지 전달 시 데이터 분할 방법에 대한 규칙이며, IP는 발신지와 수신지의 주소 표현 방법입니다.
결국 TCP/IP는 데이터 표현의 표준을 정의한 것입니다.
진단통신
제어기의 펌웨어 업데이트, 리프로그래밍, 그 외 차량 튜닝에 사용되며
OBD-II 라는 커넥터를 통해 진단통신을 합니다. 법규는 OBD이며 표준은 ISO입니다.
UDS는 통합 진단 서비스로 진단 통신 이용 시 데이터를 주고 받을 수 있는 표준 방식입니다.
게이트웨이
차량 내부의 여러 네트워크를 한 곳에 모아 서로 정보를 공유할 수 있도록 해주는 장치로 이종 통신 네트워크 간의 정보 교환, 내부 네트워크 관리, 외부 인터페이스 통제 등의 역할을 담당하며
Autosar를 표준 플랫폼으로 채택하고 있다고 합니다.
V2X (Vehicle to Everything)
간단하게 설명하자면 차량과 연결되는 모든 것을 의미합니다.
그래서 X의 자리에 별의별개 다들어갈 수 있습니다.
V2V 차량대 차량, V2P 차량대 보행자, V2I 차량대 인프라 등등 그냥 머리속에 떠오르는 것들은 다 넣을 수 있습니다.
V2V/V2I : DSRC/WAVE, CALM, LTE, 5G, Wifi 등 (V2V 차량, V2I 인프라)
V2D : BLE, USB, UWB (V2D 스마트 디바이스)
V2G : PLC, CAN, J2847 ( V2G 충전기?)
전기차 충전 시스템의 개념
전기차는 충전을 할 때 충전기와 차량간의 전기 연결이 필요합니다. 충전 스테이션과 통신을 통해 충전정보를 서로 교환하게 됩니다.
OBC라는 개념이 등장하는데, On Board Charger 라는 친구로 AC로 충전을 할 때 직류 DC 전원으로 변환해주는 친구입니다.
DC로 충전하는 경우에는 BMS (battery management System) 이 관리를 합니다.
여러 표준이 있지만 이에 대한 이야기는 나중에 따로 글로 설명할 예정입니다.
CCP
CCP는 CAN Calibration Protocol로 CAN통신을 이용해서 데이터를 이용해서 데이터를 수집 교정하기 위한 프로토콜로 제어기 내부의 데이터 수집, 튜닝의 목적을 가지고 있다.
XCP는 이제 CAN만 한정하는게 아니라 LIN이나 Ethernet도 이런 프로토콜로 제어기의 메모리 읽기, 쓰기, 제어기 안의 소프트웨어의 ReFlashing, 동기적인 Data Acquision Calibration 등의 기능을 한다.
차량용 통신 보안 기술
1. 기밀성 : 인증된 장비만이 차량 내부 네트워크로 접근이 가능하다.
2. 무결성 : 제어기 인증 및 메시지 암호화 복호화 관련 기술을 적용해 외부에서 통신 메시지를 위조 및 변조하지 못하도록함
3. 가용성 : 공격을 받아도 서비스가 지속될 수 있도록 하는
네트워크 관리 기술
제어기의 동작 상태를 모니터링해야한다. OSEK NM 이라는 기술은 통신 방식과 상관없이 네트워크를 관리하는 기법이다. 그래서 이 기술로 안정적인 통신을 보장한다.
이정도가 있겠습니다.
더 깊은 내용이 필요하다면 따로 찾아보면 될 것이고
저는 임베디드와 전기차 그리고 전기차 충전에 초점을 맞춰서 다음 글을 진행할 예정입니다.
'ㅇ공부#자동차 > 전기차' 카테고리의 다른 글
| 전기차 직무 알아보기 3. 전기차 충전기 직무 지식 (0) | 2023.06.18 |
|---|---|
| 전기차 직무 알아보기 2. 전기차 충전관련 기초 지식 (0) | 2023.06.18 |