Install ROS Bridge for ROS 2 - CARLA Simulator
Install ROS Bridge for ROS 2 - CARLA Simulator
ROS bridge installation for ROS 2 This section is a guide on how to install the ROS bridge on Linux for use with ROS 2. You will find the prerequisites, installation steps, how to run a basic package to make sure everything is working well and commands to
carla.readthedocs.io
- ROS2 FOXY 환경 지원 20.04
- rviz가 있어야합니다.
mkdir -p ~/carla-ros-bridge && cd ~/carla-ros-bridge
git clone --recurse-submodules https://github.com/carla-simulator/ros-bridge.git src/ros-bridgesource /opt/ros/foxy/setup.bash
rosdep update
rosdep install --from-paths src --ignore-src -r
colcon buildcd /opt/carla-simulator
./CarlaUE4.sh(Local이라면 따로ROS를 설치하면서 ROS Domain을 따로 설정했으니, 따로 설정하지 않아도 됩니다.)
새로운 터미널에서 다음을 입력합니다.
export CARLA_ROOT=/opt/carla-simulator
export PYTHONPATH=$PYTHONPATH:$CARLA_ROOT/PythonAPI/carla/dist/carla-0.9.13-py3.7-linux-x86_64.egg:$CARLA_ROOT/PythonAPI/carla(버전에 따라 다릅니다)
source ./install/setup.bash
# Option 1, start the basic ROS bridge package
ros2 launch carla_ros_bridge carla_ros_bridge.launch.py
# Option 2, start the ROS bridge with an example ego vehicle
ros2 launch carla_ros_bridge carla_ros_bridge_with_example_ego_vehicle.launch.py3개의 터미널이 되겠군요, 브릿지를 launch 하고 ego_vehicle을 소환했습니다.
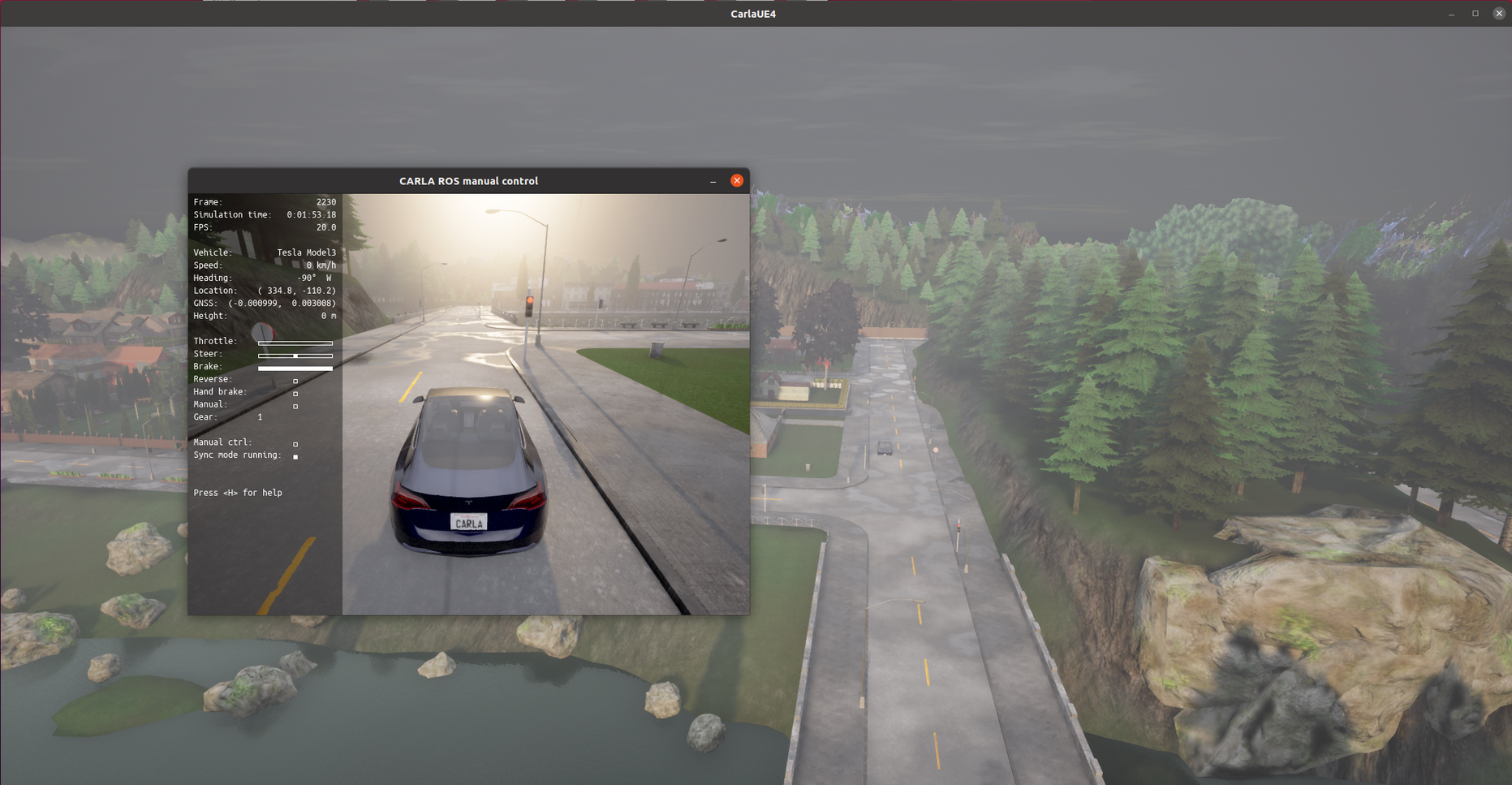
조작법은 B를 눌러서 수동조작모드를 켜고 핸드브레이크(space)를 누르고 wasd 로 이동하면 됩니다.
ROS와 연결이 잘되었는지 체크하려면 다른 터미널에서 ROS 환경을 불러오고
ros2 topic list를 입력하면됩니다.

추가적으로 RVIZ와 함께 사용할 수 있습니다.
ros2 launch carla_ros_bridge carla_ros_bridge.launch.py passive:=True다음으로 브릿지를 실행합니다.
다음은 ROS topic을 직접발행해 자동차를 전진시키는 명령입니다.
ros2 topic pub /carla/ego_vehicle/vehicle_control_cmd carla_msgs/CarlaEgoVehicleControl "{throttle: 0.3, steer: 0.0}" -r 10
다음은 차량을 후진시키는 방법입니다.
ros2 topic pub /carla/ego_vehicle/vehicle_control_cmd carla_msgs/CarlaEgoVehicleControl "{throttle: 0.5, steer: -0.2, reverse: True}" -r 10
다음은 날씨(시간)를 변경하는 방법입니다.
ros2 topic pub /carla/weather_control carla_msgs/msg/CarlaWeatherParameters "{cloudiness: 0.0, precipitation: 0.0, precipitation_deposits: 0.0, wind_intensity: 0.0, fog_density: 0.0, fog_distance: 0.0, wetness: 0.0, sun_azimuth_angle: 0.0, sun_altitude_angle: 0.0}"
'공부#Robotics#자율주행 > carla' 카테고리의 다른 글
| (CARLA) 3. segmentation 정보나 Bounding Box를 얻기 (0) | 2023.04.30 |
|---|---|
| (CARLA) 2. 도로의 Traffic을 제어하는 방법 (0) | 2023.04.30 |
| (CARLA) 1. PythonAPI를 이용해서 CARLA 사용하기 (0) | 2023.04.30 |
| (Ubuntu) 우분투에 CARLA 설치하는 방법 및 활용법 (0) | 2023.04.30 |
| (자율주행 시뮬레이터) 우분투 20.04에 Carla 를 설치하고, 객체를 소환시켜보자. (0) | 2023.03.13 |